- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

บ้าน
>
สินค้า > สเต็ปเปอร์มอเตอร์แบบวงปิด > สเต็ปเปอร์มอเตอร์แบบวงปิด 2 เฟส > ซีรี่ส์ 42 Nema 17 สเต็ปเปอร์มอเตอร์แบบวงปิด 2 เฟส
สินค้า
- เอซีเซอร์โวมอเตอร์
- ดีซีเซอร์โวมอเตอร์
- สเต็ปเปอร์มอเตอร์แบบวงปิด
- ไฮบริดสเต็ปเปอร์มอเตอร์
- ไดร์เวอร์ไฮบริดสเต็ปเปอร์มอเตอร์
- ไดร์เวอร์สเต็ปเปอร์มอเตอร์แบบวงปิด
- ไดรเวอร์เอซีเซอร์โวมอเตอร์
- สเต็ปเปอร์มอเตอร์ในตัว
- ไดร์เวอร์เซอร์โวมอเตอร์กระแสตรง
- สกรูมอเตอร์
- RS485 หรือ CAN หรือ Ethercat Bus ประเภท Stepper Driver
- ตัวลดดาวเคราะห์
- คอนโทรลเลอร์พีแอลซี
- หน้าจอสัมผัส HMI
- ชุดไดร์เวอร์เซอร์โวมอเตอร์ Ethercat AC
- ชุดไดร์เวอร์เซอร์โวมอเตอร์ AC A8
- เซอร์โวมอเตอร์ในตัว
สินค้าใหม่
 Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 235N.m 37KW AC380V 73A 1500/2000RPM IP65
Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 235N.m 37KW AC380V 73A 1500/2000RPM IP65 Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 191N.m 30KW AC380V 52A 1500/2000RPM IP65
Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 191N.m 30KW AC380V 52A 1500/2000RPM IP65 Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65
Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65 Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65
Lichuan AC เซอร์โวมอเตอร์ไดรเวอร์ชุดกำลังสูง 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65- สินค้าใหม่ทั้งหมด

ซีรี่ส์ 42 Nema 17 สเต็ปเปอร์มอเตอร์แบบวงปิด 2 เฟส
ซื้อส่วนลด S42 ซีรี่ส์ Nema 17 สเต็ปเปอร์มอเตอร์แบบวงปิด 2 เฟสพร้อมตัวอย่างฟรีที่ผลิตในประเทศจีน LICHUAN® is42 Series Nema 17 2 เฟส Closed Loop Stepper Motor ผู้ผลิตและผู้จัดจำหน่ายในประเทศจีน
ส่งคำถาม
รายละเอียดสินค้า
LICHUAN® ยินดีต้อนรับคุณอย่างอบอุ่นในการขายส่งสเต็ปเปอร์มอเตอร์แบบวงปิด 42 ซีรี่ส์ Nema 17 2 เฟสจากโรงงานของเรา ผลิตภัณฑ์ของเราได้รับการรับรอง CE และปัจจุบันมีสินค้าคงคลังในโรงงานจำนวนมาก โรงงาน Lichuan มีประสบการณ์ในการผลิตมากกว่า 14 ปี เราสนับสนุน OEM และ ODM เราจะให้บริการที่ดีและลดราคาจากโรงงาน เรายินดีต้อนรับผู้จัดจำหน่ายเพิ่มเติมเพื่อเข้าร่วม LICHUAN
ซีรีส์ 42 Nema17 สเต็ปเปอร์มอเตอร์แบบวงปิด 2 เฟส การใช้วัตถุดิบคุณภาพสูงและเหล็กซิลิกอนแม่เหล็กถาวรมาตรฐานสูง พร้อมตัวเข้ารหัสความแม่นยำสูง 1,000 บรรทัด เอาชนะปัญหาสเต็ปเปอร์มอเตอร์แบบวงเปิดได้อย่างสมบูรณ์ ในขณะที่เพิ่มอย่างมีนัยสำคัญ ประสิทธิภาพความเร็วสูงของมอเตอร์ เพื่ออำนวยความสะดวกในการอัพเกรดโปรแกรมไดรฟ์แบบทีละขั้นตอน ลดต้นทุนเมื่อเทียบกับเซอร์โวมอเตอร์เพื่อลดมากกว่า 50% มอเตอร์ยาว 68 มม. ~ 79 มม. ช่วงแรงบิด: 0.48N.m ~ 0.72N.m เส้นผ่านศูนย์กลางเพลามอเตอร์ 5 มม. หรือ 6 มม. สเต็ปเปอร์มอเตอร์แบบวงปิด 42 ซีรีส์ Nema17 2 เฟสสามารถจับคู่กับไดรเวอร์ 4 ประเภท: RS485 คาโนเพน อีเทอร์แคท. ไดรเวอร์ควบคุมพัลส์
พารามิเตอร์ประสิทธิภาพทางไฟฟ้า
| รายการ | ข้อมูลจำเพาะ |
| ความแม่นยำของมุมขั้นบันได | ±5%(เต็มขั้น) |
| ความแม่นยำของความต้านทาน | ±10%(20°C) |
| Inductance Accuracy | ±20%(1กิโลเฮิร์ตซ์) |
| อุณหภูมิสูงขึ้น | สูงสุด 80°C (กระแสไฟที่กำหนด, เปิดเครื่อง 2 เฟส) |
| อุณหภูมิโดยรอบ | -20°C~*50°C |
| ความต้านทานของฉนวน | 100MQMin 500VDC |
| ความแข็งแรงของฉนวน | 500V AC 1 นาที |
| โหลดรัศมีที่อนุญาต | สูงสุด 0.02 มม. (บรรจุ 450 กรัม) |
| โหลดแรงขับที่อนุญาต | สูงสุด 0.08 มม. (บรรจุ 450 กรัม) |
| โหลดรัศมีสูงสุด | 28N (20 มม. จากพื้นผิวหน้าแปลน) |
| โหลดสูงสุดของเพลา | 10น |
| ชุด | ขั้นตอน มุม(") |
ความยาว (มม.) |
โฮลดิ้ง แรงบิด (Nm) |
เฟส ปัจจุบัน(A) |
หมุนเวียน ความเฉื่อย (g.cm²) |
น้ำหนัก (กิโลกรัม) |
ตัวเข้ารหัส ความละเอียด (PPR) |
| LC42H249 | 1.8 | 68 | 0.48 | 1.2 | 68 | 0.47 | 1000 |
| LC42H261 | 1.8 | 79 | 0.72 | 1.2 | 102 | 0.60 | 1000 |
ด้านบนเป็นสินค้าตัวแทน สินค้าสามารถปรับแต่งได้!
รูปทรงและขนาดการติดตั้ง (หน่วย:มม.)

โหมดเพลาของมอเตอร์
| แบบอย่าง | เพลา เส้นผ่านศูนย์กลาง (มม.) |
เพลา ส่วนขยาย (มม.) |
เพลา ความยาว(มิลลิเมตร) |
| LC42H249 | φ5หรือφ6 | ดีคัท 0.5 x 15 | 24 |
| LC42H261 | φ5หรือφ6 | ดีคัท 0.5 x15 | 24 |
แผนภาพการเดินสายไฟมอเตอร์
สีลวดมอเตอร์

คำจำกัดความของตัวเข้ารหัส สีตะกั่ว
| 1 | สีเหลือง | อีบี+ |
| 2 | สีเขียว | อีบี- |
| 3 | สีดำ | อีเอ+ |
| 4 | สีฟ้า | อีเอ- |
| 5 | สีแดง | +5VCC |
| 6 | สีขาว | EGND |
หมายเหตุ
1. จะต้องเชื่อมต่อเฟสอย่างถูกต้องขณะเชื่อมต่อ
มอเตอร์และไดรเวอร์
2. การสร้างความร้อนที่ชัดเจนของมอเตอร์อาจเกิดขึ้นได้ภายใต้สภาวะการขับขี่ที่แตกต่างกัน อนุญาตให้อุณหภูมิพื้นผิวของมอเตอร์เกิน 85 ℃ ในระหว่างการทำงาน
3. มอเตอร์ต้องอยู่ในตำแหน่งโดยการติดตั้ง rabbet บนฝาครอบด้านหน้าของมอเตอร์ จะต้องให้ความสนใจกับการจับคู่ข้อผิดพลาด และจะต้องควบคุมศูนย์กลางระหว่างเพลามอเตอร์และโหลดอย่างเคร่งครัด
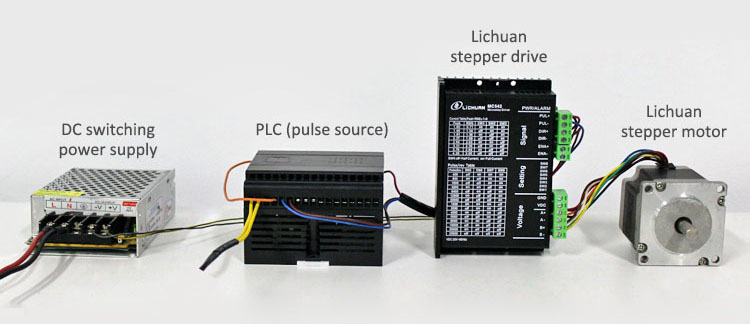
แผนภาพการเดินสายไฟของแอปพลิเคชัน
ระบบควบคุมสเต็ปมอเตอร์ที่สมบูรณ์ควรมีผลิตภัณฑ์ที่แสดงด้านล่าง
บรรจุภัณฑ์สินค้า

เครื่องจักรผลิตผลิตภัณฑ์จากโรงงาน Lichuan
-

เครื่องแกะสลัก -

อุปกรณ์เคลือบ -

เครื่องมาร์คกิ้งไฟเบอร์ลาสเตอร์ -

เครื่องขันสกรู -

เครื่องทดสอบ -

เครื่องพิมพ์ยูวี
-

เครื่องบัดกรีอัตโนมัติ -

ถือเครื่องทดสอบแรงบิด -

เครื่องสกรู -

เครื่องออสซิลโลกราฟ
การใช้งานในอุตสาหกรรม
-

แขนหุ่นยนต์ -

เครื่องตัดเลเซอร์
-

การพิมพ์ 3 มิติ -

เครื่องซีเอ็นซี -

ยืนยันอัตโนมัติ -

เครื่องแกะสลัก
แท็กยอดนิยม: 42 ซีรี่ส์ Nema 17 2 เฟส Closed Loop Stepper Motor, จีน, ผู้ผลิต, ซัพพลายเออร์, โรงงาน, ปรับแต่ง, ผลิตในประเทศจีน, ราคาถูก, CE, ทนทาน, คุณภาพ
หมวดหมู่ที่เกี่ยวข้อง
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง