- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

บทความเพื่อทำความเข้าใจความแตกต่างระหว่างสเต็ปเปอร์มอเตอร์และเซอร์โวและเซอร์โวมอเตอร์
I. ความแตกต่างระหว่างสเต็ปเปอร์มอเตอร์และเซอร์โวและเซอร์โวมอเตอร์
สเต็ปเปอร์มอเตอร์: เป็นสัญญาณพัลส์ไฟฟ้าในการกระจัดเชิงมุมหรือการกระจัดของเส้นของชิ้นส่วนสเต็ปเปอร์มอเตอร์องค์ประกอบควบคุมวงเปิด พูดง่ายๆ ก็คืออาศัยสัญญาณพัลส์ไฟฟ้าเพื่อควบคุมมุมและจำนวนรอบ ดังนั้นเขาจึงอาศัยเพียงสัญญาณพัลส์เพื่อกำหนดจำนวนการหมุน เนื่องจากไม่มีเซนเซอร์ มุมหยุดจึงอาจเบี่ยงเบนไป อย่างไรก็ตาม สัญญาณพัลส์ที่แม่นยำจะลดการเบี่ยงเบนให้เหลือน้อยที่สุด
เซอร์โวมอเตอร์: อาศัยวงจรควบคุมเซอร์โวเพื่อควบคุมความเร็วของมอเตอร์ ผ่านเซ็นเซอร์เพื่อควบคุมตำแหน่งการหมุน ดังนั้นการควบคุมตำแหน่งจึงมีความแม่นยำมาก และความเร็วในการหมุนก็แปรผันเช่นกัน
เซอร์โว (Electronic Servo): ส่วนประกอบหลักของเซอร์โวคือเซอร์โวมอเตอร์ ประกอบด้วยวงจรควบคุมเซอร์โวมอเตอร์ + ชุดเกียร์ทดรอบ โอ้ใช่แล้ว เซอร์โวมอเตอร์ไม่มีชุดเกียร์ทดรอบ และเซอร์โวก็มีชุดเกียร์ทดรอบ
ในกรณีของลิมิตเซอร์โว จะอาศัยโพเทนชิออมิเตอร์ใต้เพลาเอาท์พุตเพื่อกำหนดมุมบังคับเลี้ยวของแขนหางเสือ การควบคุมสัญญาณเซอร์โวเป็นสัญญาณพัลส์ไวด์มอดูเลต (PWM) ซึ่งไมโครคอนโทรลเลอร์สามารถสร้างสัญญาณนี้ได้อย่างง่ายดาย
ครั้งที่สอง หลักการพื้นฐานของสเต็ปเปอร์มอเตอร์
มันทำงานอย่างไร:
โดยปกติโรเตอร์ของมอเตอร์จะเป็นแม่เหล็กถาวร และเมื่อกระแสไหลผ่านขดลวดสเตเตอร์ ขดลวดสเตเตอร์จะสร้างสนามแม่เหล็กเวกเตอร์ สนามแม่เหล็กนี้จะขับเคลื่อนโรเตอร์ให้หมุนเป็นมุม ดังนั้น ทิศทางของคู่สนามแม่เหล็กของโรเตอร์จะเหมือนกับทิศทางของสนามแม่เหล็กของสเตเตอร์ เมื่อสนามแม่เหล็กเวกเตอร์ของสเตเตอร์หมุนเป็นมุม โรเตอร์ยังหมุนเป็นมุมกับสนามแม่เหล็กนี้ด้วย สำหรับพัลส์ไฟฟ้าอินพุตแต่ละตัว มอเตอร์จะหมุนไปข้างหน้าหนึ่งก้าวเชิงมุม การกระจัดเชิงมุมเอาต์พุตเป็นสัดส่วนกับจำนวนพัลส์อินพุต และความเร็วในการหมุนเป็นสัดส่วนกับความถี่ของพัลส์ โดยการเปลี่ยนลำดับการจ่ายไฟของขดลวด มอเตอร์จะกลับด้าน ดังนั้นจึงสามารถควบคุมจำนวนและความถี่ของพัลส์และลำดับการให้พลังงานของขดลวดของแต่ละเฟสของมอเตอร์ได้เพื่อควบคุมการหมุนของสเต็ปเปอร์มอเตอร์
หลักการสร้างความร้อน:
มักจะเห็นมอเตอร์ทุกชนิด ภายในเป็นแกนเหล็ก และขดลวด ความต้านทานของขดลวด กำลังจะทำให้เกิดการสูญเสีย ขนาดการสูญเสีย และความต้านทาน และกระแสจะเป็นสัดส่วนกับกำลังสอง ซึ่งมักเรียกว่าการสูญเสียทองแดง หากกระแสไฟฟ้าไม่ใช่ DC มาตรฐานหรือคลื่นไซน์ ก็จะทำให้เกิดการสูญเสียฮาร์มอนิกด้วย แกนกลางมีผลกระแสไหลวนฮิสเทรีซิส ในสนามแม่เหล็กสลับจะทำให้เกิดการสูญเสีย ขนาดของวัสดุ กระแส ความถี่ แรงดันไฟฟ้าที่เกี่ยวข้อง ซึ่งเรียกว่าการสูญเสียธาตุเหล็ก การสูญเสียทองแดงและการสูญเสียธาตุเหล็กจะแสดงออกมาในรูปของการสร้างความร้อน ซึ่งส่งผลต่อประสิทธิภาพของมอเตอร์ โดยทั่วไปสเต็ปปิ้งมอเตอร์จะติดตามความแม่นยำของตำแหน่งและแรงบิดเอาต์พุต ประสิทธิภาพค่อนข้างต่ำ กระแสโดยทั่วไปมีขนาดใหญ่กว่า และส่วนประกอบฮาร์มอนิกสูง ความถี่ของกระแสสลับกับความเร็วและการเปลี่ยนแปลง ดังนั้นสเต็ปปิ้งมอเตอร์โดยทั่วไปจะมีสถานการณ์ความร้อน และสถานการณ์จะรุนแรงกว่ามอเตอร์ AC ทั่วไป
ที่สาม การก่อสร้างหางเสือ
เซอร์โวส่วนใหญ่ประกอบด้วยตัวเครื่อง แผงวงจร มอเตอร์ขับเคลื่อน ตัวลดเกียร์ และองค์ประกอบการตรวจจับตำแหน่ง หลักการทำงานของมันคือเครื่องรับจะส่งสัญญาณไปยังเซอร์โว และ IC บนแผงวงจรจะขับเคลื่อนมอเตอร์ไร้แกนเพื่อเริ่มหมุน และกำลังถูกส่งไปยังสวิงอาร์มผ่านเฟืองทด และในขณะเดียวกัน เครื่องตรวจจับตำแหน่งจะส่งสัญญาณกลับมาเพื่อตรวจสอบว่ามาถึงตำแหน่งแล้วหรือไม่ จริงๆ แล้วเครื่องตรวจจับตำแหน่งนั้นเป็นตัวต้านทานแบบแปรผันได้ เมื่อเซอร์โวหมุน ค่าตัวต้านทานจะเปลี่ยนตาม และสามารถทราบมุมการหมุนได้โดยการตรวจจับค่าตัวต้านทาน เซอร์โวมอเตอร์ทั่วไปเป็นลวดทองแดงบางๆ พันรอบโรเตอร์แบบ 3 ขั้ว เมื่อกระแสไหลผ่านขดลวดจะสร้างสนามแม่เหล็ก และบริเวณขอบของแม่เหล็กโรเตอร์จะทำให้เกิดแรงผลัก ซึ่งจะสร้างแรงหมุนตามมา ตามหลักฟิสิกส์ โมเมนต์ความเฉื่อยของวัตถุจะเป็นสัดส่วนโดยตรงกับมวลของมัน ดังนั้น ยิ่งมวลของวัตถุที่จะหมุนมากเท่าใด แรงก็จะยิ่งต้องใช้มากขึ้นเท่านั้น เพื่อให้หมุนได้เร็วและใช้พลังงานต่ำ เซอร์โวจึงทำจากลวดทองแดงบางๆ บิดเป็นกระบอกกลวงบางมาก เกิดเป็นโรเตอร์กลวงที่มีน้ำหนักเบามากโดยไม่มีเสา และแม่เหล็กถูกวางไว้ภายในกระบอกสูบ ซึ่งเป็นมอเตอร์แบบถ้วยกลวง
เพื่อให้เหมาะกับสภาพแวดล้อมการทำงานที่แตกต่างกัน มีเซอร์โวที่มีการออกแบบกันน้ำและกันฝุ่น และเพื่อตอบสนองความต้องการโหลดที่แตกต่างกัน มีเฟืองพลาสติกและเฟืองโลหะสำหรับเซอร์โว และเฟืองโลหะสำหรับเซอร์โวโดยทั่วไปจะมีแรงบิดสูงและความเร็วสูง โดยมีข้อดีคือเฟืองจะไม่บิ่นเนื่องจากมีโหลดมากเกินไป เซอร์โวเกรดสูงจะติดตั้งลูกปืนเพื่อให้การหมุนเร็วขึ้นและแม่นยำยิ่งขึ้น มีความแตกต่างระหว่างตลับลูกปืนแบบหนึ่งและสองตลับลูกปืน แน่นอนว่าตลับลูกปืนทั้งสองจะดีกว่า เซอร์โว FET ใหม่ส่วนใหญ่ใช้ FET (Field Effect Transistor) ซึ่งมีข้อดีคือมีความต้านทานภายในต่ำ จึงมีการสูญเสียกระแสไฟฟ้าน้อยกว่าทรานซิสเตอร์ปกติ
IV. หลักการทำงานของเซอร์โว
จากคลื่น pwm เข้าสู่วงจรภายในเพื่อสร้างแรงดันไบอัส เครื่องกำเนิดคอนแทคเตอร์จะขับเคลื่อนโพเทนชิออมิเตอร์ผ่านเกียร์ลดเพื่อขับเคลื่อน ดังนั้นเมื่อความแตกต่างของแรงดันไฟฟ้าเป็นศูนย์ มอเตอร์จะหยุด เพื่อให้บรรลุผลของเซอร์โว
โปรโตคอลสำหรับเซอร์โว PWM เหมือนกันทั้งหมด แต่เซอร์โวล่าสุดที่ปรากฏอาจแตกต่างกัน
โดยทั่วไปโปรโตคอล: ความกว้างระดับสูงใน 0.5ms ~ 2.5ms เพื่อควบคุมเซอร์โวให้หมุนผ่านมุมต่างๆ
V. เซอร์โวมอเตอร์ทำงานอย่างไร
รูปด้านล่างแสดงวงจรควบคุมเซอร์โวมอเตอร์ที่สร้างด้วยเครื่องขยายสัญญาณปฏิบัติการกำลัง LM675 และมอเตอร์เป็นเซอร์โวมอเตอร์กระแสตรง ดังที่เห็นจากภาพ แอมพลิฟายเออร์สำหรับการดำเนินงานกำลัง LM675 จ่ายไฟ 15V และแรงดันไฟฟ้า 15V จะถูกเพิ่มให้กับอินพุตในเฟสของแอมพลิฟายเออร์สำหรับการดำเนินงาน LM675 ถึง RP 1 และแรงดันเอาต์พุตของ LM675 จะถูกเพิ่มเข้ากับอินพุตของเซอร์โวมอเตอร์ มอเตอร์มีเครื่องกำเนิดสัญญาณการวัดความเร็วเพื่อการตรวจจับความเร็วมอเตอร์แบบเรียลไทม์ ในความเป็นจริง เครื่องกำเนิดสัญญาณความเร็วเป็นเครื่องกำเนิดไฟฟ้าชนิดหนึ่ง และแรงดันเอาต์พุตของมันจะแปรผันตามความเร็วในการหมุน แรงดันไฟฟ้าเอาท์พุตจากเครื่องกำเนิดสัญญาณการวัดความเร็ว G จะถูกป้อนกลับไปยังอินพุตแบบกลับด้านของเครื่องขยายสัญญาณการทำงานเป็นสัญญาณข้อผิดพลาดเกี่ยวกับความเร็วหลังจากวงจรแบ่งแรงดันไฟฟ้า ค่าแรงดันไฟฟ้าที่กำหนดโดยโพเทนชิโอมิเตอร์คำสั่งความเร็ว RP1 จะถูกเพิ่มไปยังอินพุตในเฟสของเครื่องขยายเสียงในการดำเนินงานหลังจากแบ่งแรงดันไฟฟ้าเป็น R1.R2 ซึ่งเทียบเท่ากับแรงดันอ้างอิง
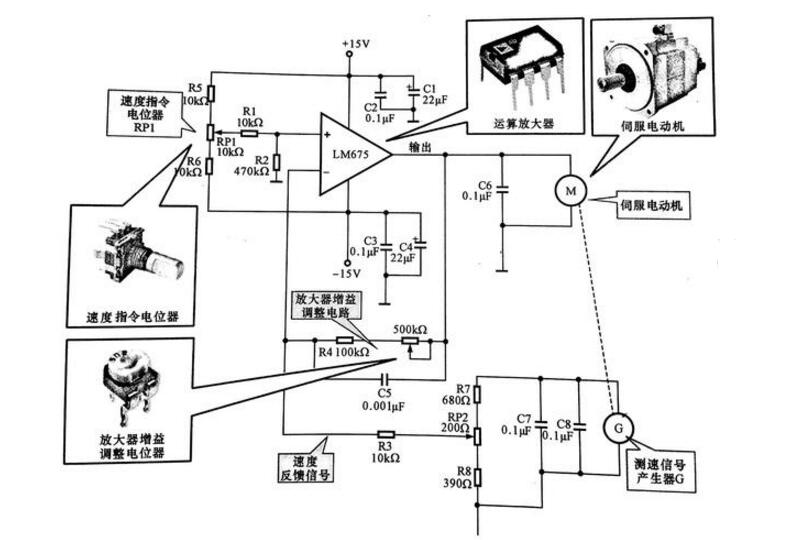
แผนผังการควบคุมเซอร์โวมอเตอร์
เซอร์โวมอเตอร์: ระบุด้วยตัวอักษร M สำหรับเซอร์โวมอเตอร์ ซึ่งเป็นแหล่งพลังงานสำหรับระบบขับเคลื่อน เครื่องขยายสัญญาณในการดำเนินงาน: แสดงด้วยชื่อวงจร เช่น LM675 เป็นชิ้นส่วนเครื่องขยายสัญญาณในวงจรควบคุมเซอร์โวที่ให้กระแสไฟขับเคลื่อนสำหรับเซอร์โวมอเตอร์
โพเทนชิโอมิเตอร์คำสั่งความเร็ว RP1: ตั้งค่าแรงดันอ้างอิงของเครื่องขยายสัญญาณการทำงานในวงจร เช่น การตั้งค่าความเร็ว โพเทนชิโอมิเตอร์การปรับเกนของแอมพลิฟายเออร์ RP2: ใช้ในวงจรเพื่อปรับแต่งเกนของแอมพลิฟายเออร์และขนาดของสัญญาณตอบรับความเร็วตามลำดับ
เมื่อโหลดของมอเตอร์เปลี่ยนแปลง แรงดันไฟฟ้าที่ป้อนกลับไปยังอินพุตกลับหัวของแอมพลิฟายเออร์ในการดำเนินงานก็เปลี่ยนแปลงเช่นกัน เช่น เมื่อโหลดของมอเตอร์เพิ่มขึ้น ความเร็วจะลดลง และแรงดันเอาต์พุตของเครื่องกำเนิดสัญญาณความเร็วก็ลดลงเช่นกัน เพื่อให้แรงดันไฟฟ้าที่อินพุตกลับด้านของแอมพลิฟายเออร์ในการดำเนินงานลดลง และความแตกต่างระหว่างแรงดันไฟฟ้านี้กับแรงดันอ้างอิงจะเพิ่มขึ้น และแรงดันเอาต์พุตของแอมพลิฟายเออร์ในการดำเนินงานจะเพิ่มขึ้น ในทางกลับกัน เมื่อโหลดน้อยลงและความเร็วมอเตอร์เพิ่มขึ้น แรงดันเอาท์พุตของเครื่องกำเนิดสัญญาณการวัดความเร็วจะเพิ่มขึ้น แรงดันป้อนกลับที่เพิ่มให้กับอินพุตแบบกลับด้านของแอมพลิฟายเออร์ในการดำเนินงานจะเพิ่มขึ้น ความแตกต่างระหว่างแรงดันไฟฟ้านี้และแรงดันอ้างอิงลดลง แรงดันเอาท์พุตของแอมพลิฟายเออร์ในการดำเนินงานลดลง และความเร็วของมอเตอร์จะลดลงตามนั้น เพื่อให้ความเร็วในการหมุนมีเสถียรภาพตามค่าที่ตั้งไว้โดยอัตโนมัติ